Technical Projects
Research & Publications
Exploring cutting-edge innovations in robotics, MEMS, and control systems
Robotics
View Publication
Visual servoing control of robotic fish for underwater pipeline tracking
Underwater Robotics
Visual Servoing
Pipeline Inspection Systems
Robotics
View Publication
A Novel Wheeled Robot Design for Climbing Stairs
Mobile Robotics
Stair Climbing Design
Novel Wheel Mechanisms
Control Systems
View Publication
Constrained Model Predictive Control of Variable Buoyancy Device
Model Predictive Control
Variable Buoyancy Systems
Underwater Vehicle Control

Robotics
View Publication
A study on the feasibility of robotic harvesting for Chile pepper
Agricultural Robotics
Automated Harvesting Systems
Computer Vision for Crop Detection
MEMS
View Publication
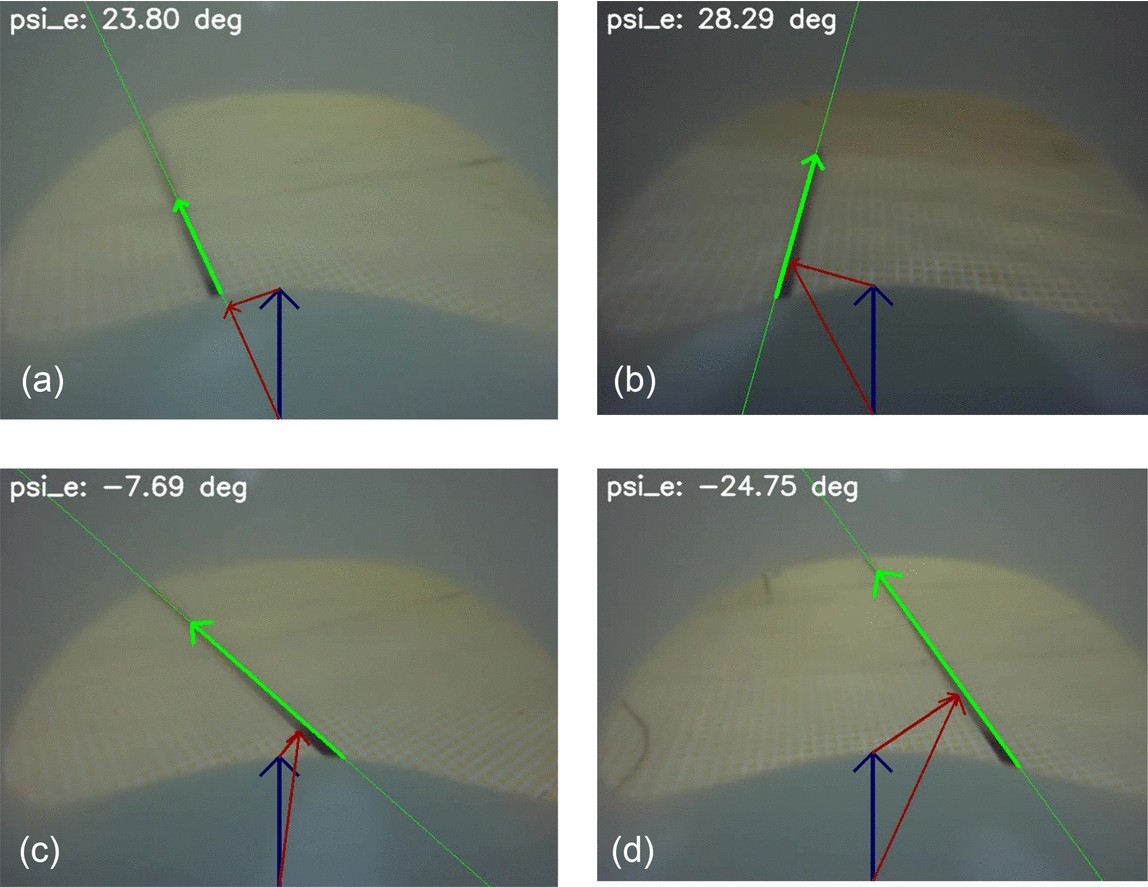
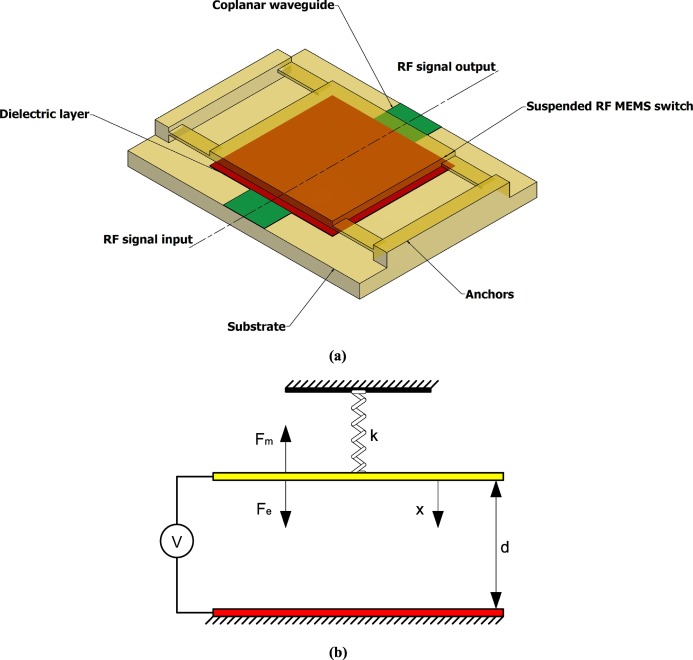
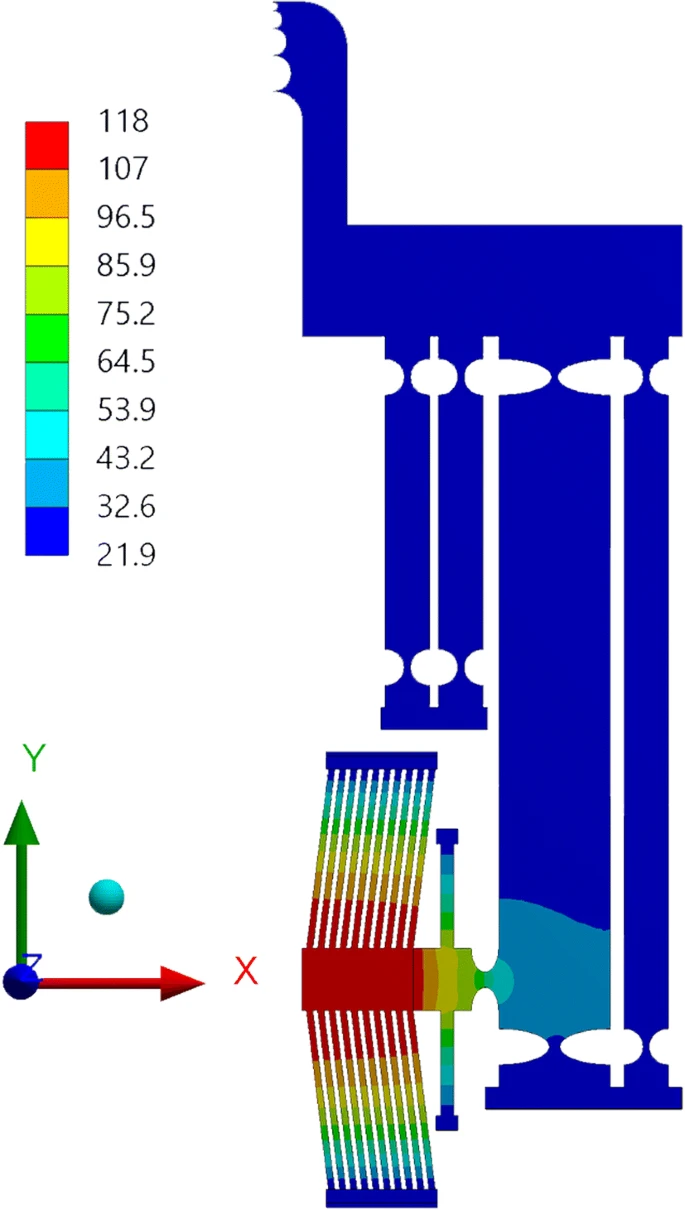
Surface roughness effects on electromechanical performance of RF-MEMS capacitive switches
RF-MEMS Technology
Surface Roughness Analysis
Electromechanical Performance Optimization
MEMS
View Publication
Design, closed-form modeling and analysis of SU-8 based electrothermal microgripper for biomedical applications
Biomedical MEMS
Electrothermal Actuation
SU-8 Based Microfabrication
Control Systems
View Publication
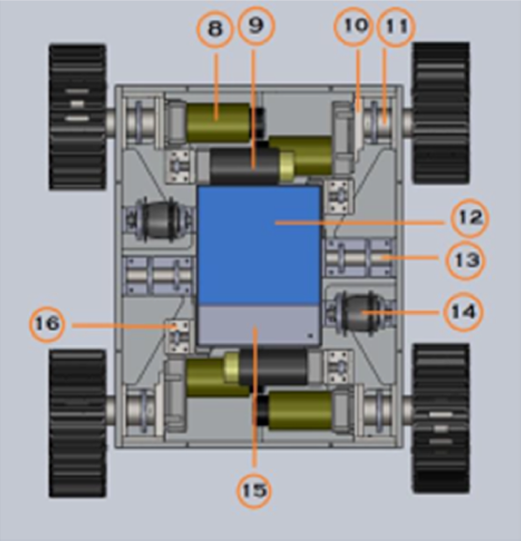
Development of NI my-RIO Based Control Module for Versatile Terrain Autonomous Mobility Platform (VTAMP)
NI my-RIO
Control Modules
Autonomous Mobility Platforms

MEMS
View Publication
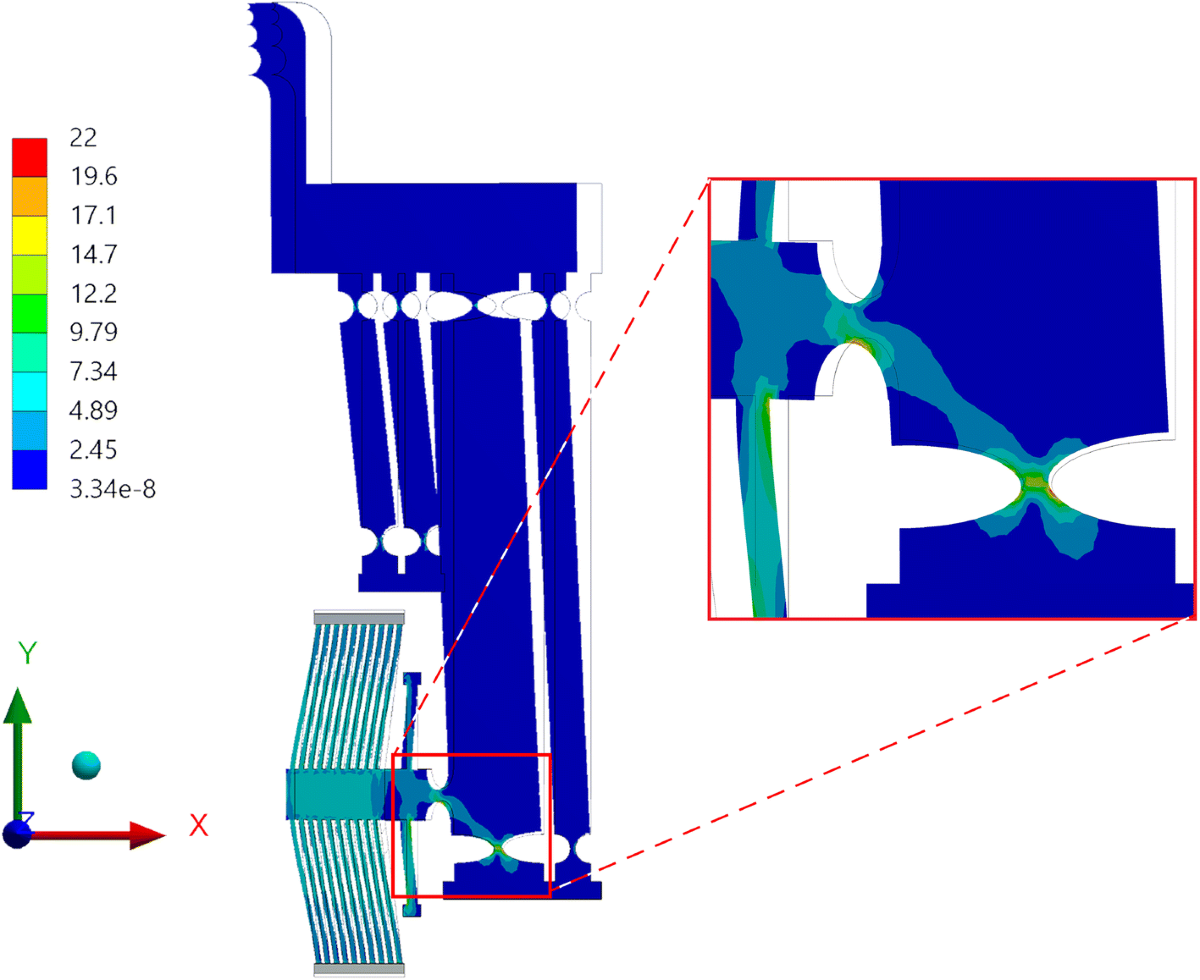
Modeling and FEM Verification of Surface-Roughness Effect on the Static Response of RF-MEMS Switches
RF-MEMS Modeling
FEM Verification
Surface Roughness Effects
MEMS
View Publication
Design of an electrothermally actuated SU-8 based microgripper for biomedical applications
Electrothermal Actuation
SU-8 Microfabrication
Biomedical Applications
Robotics
View Publication
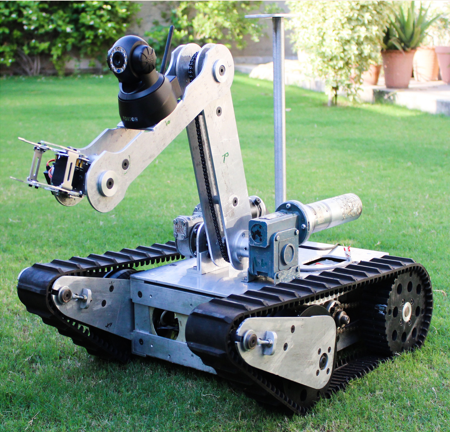
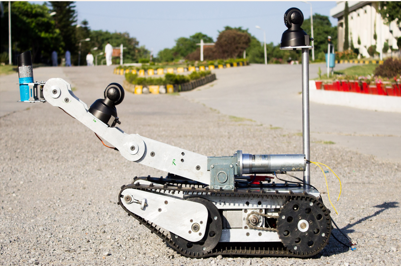
Design and experimental testing of an in-parallel actuated 3 DOF serial robotic manipulator for unmanned ground vehicle
Robotic Manipulators
Parallel Actuation
3-DOF System Design
Robotics
View Publication
Design and development of a semi-autonomous stair climbing robotic platform for rough terrains
Mobile Robotics
Stair Climbing Mechanisms
Rough Terrain Navigation

Robotics
View Publication
Object tracking with a robotic manipulator mounted on ground vehicle using Image Based Visual Servoing
Visual Servoing
Object Tracking
Mobile Manipulation Systems
Control Systems
View Publication
Development of FPGA-based system for control of an Unmanned Ground Vehicle with 5-DOF robotic arm
FPGA Control Systems
Unmanned Ground Vehicles
5-DOF Robotic Arm Control