PCB Design Portfolio – Embedded Hardware, Robotics, and Power Electronics Boards
A portfolio of PCB design work including embedded control boards, robotics hardware, sensor interfaces, motor drivers, PEM electrolyzer drivers, and prototype electronics developed from schematic design to 3D visualization and fabrication.
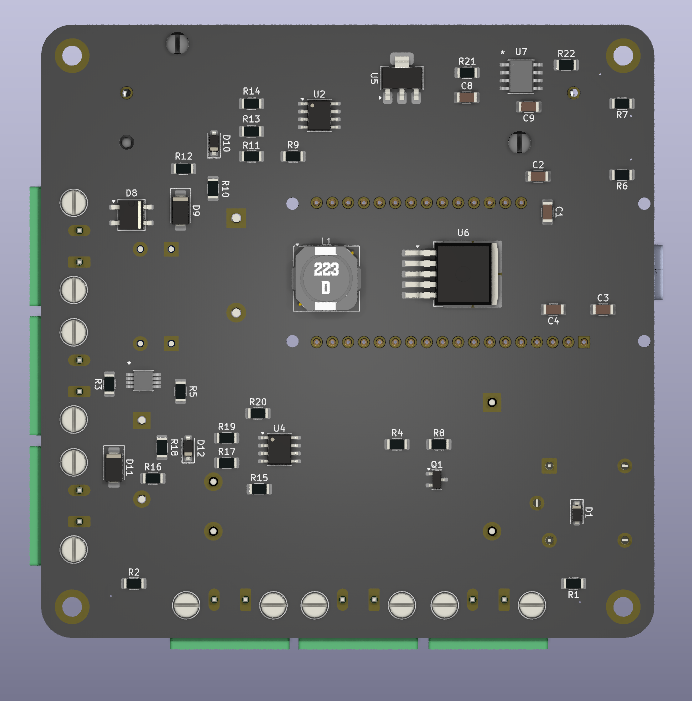
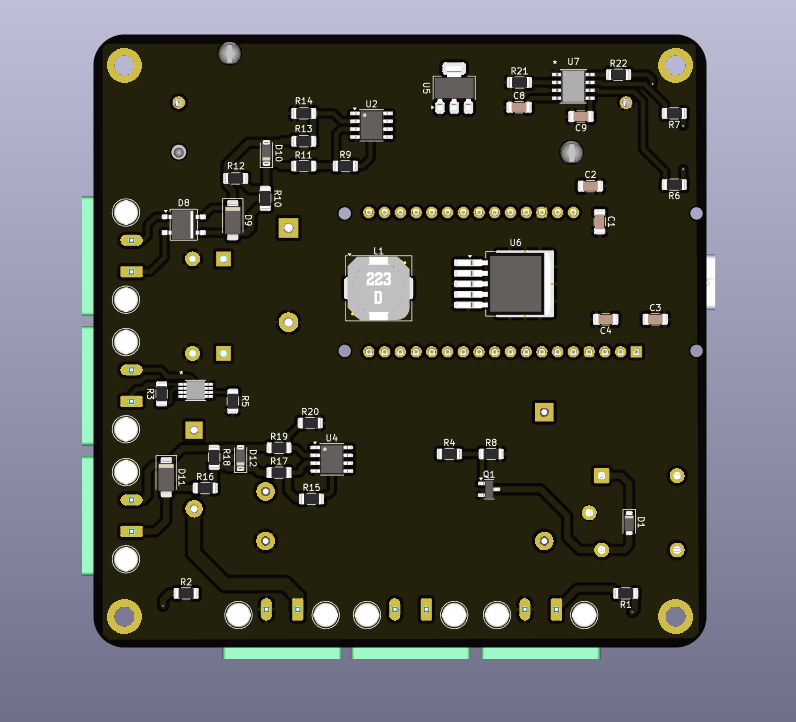
My PCB design work reflects my broader engineering background in robotics, embedded systems, automation, sensors, and electromechanical control. These projects include custom boards for robotic systems, motor control, sensor integration, power management, relay interfaces, and experimental hardware platforms. Across these designs, I worked on component placement, routing, connector planning, 3D visualization, board fabrication preparation, and practical integration with embedded controllers.
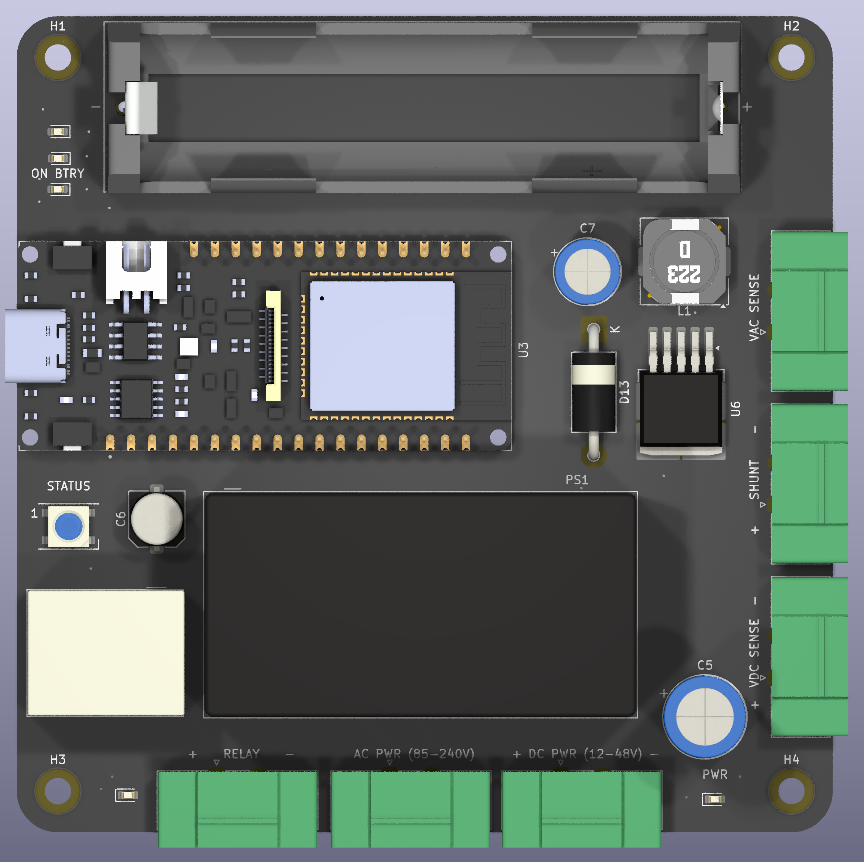
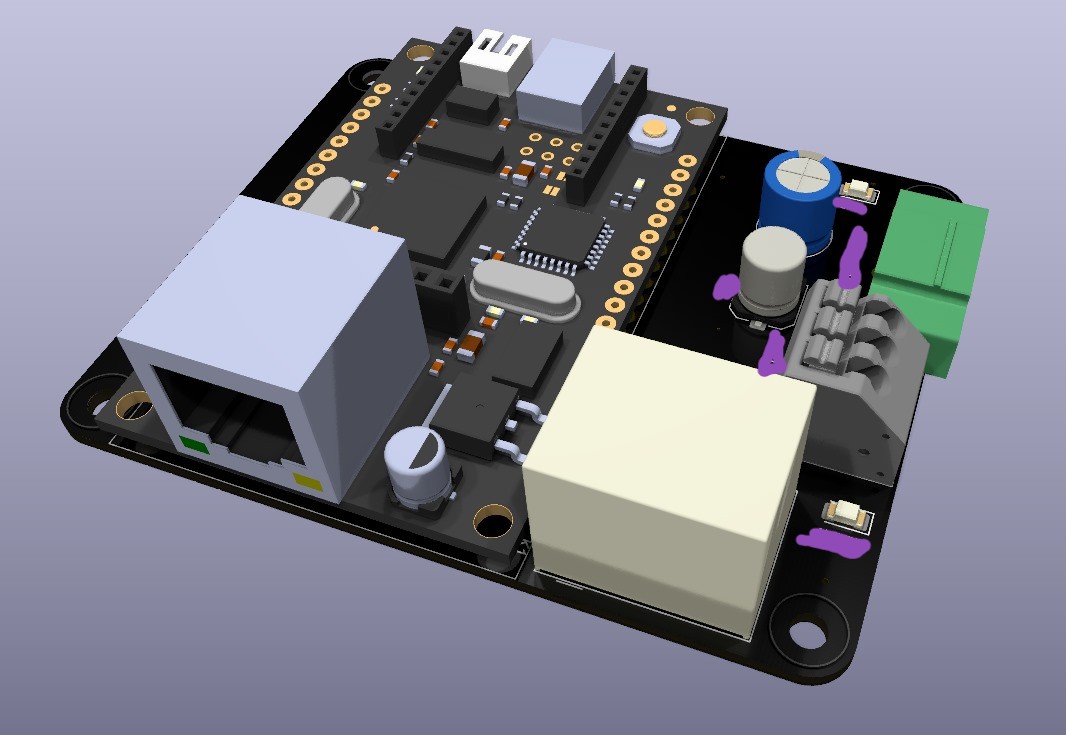
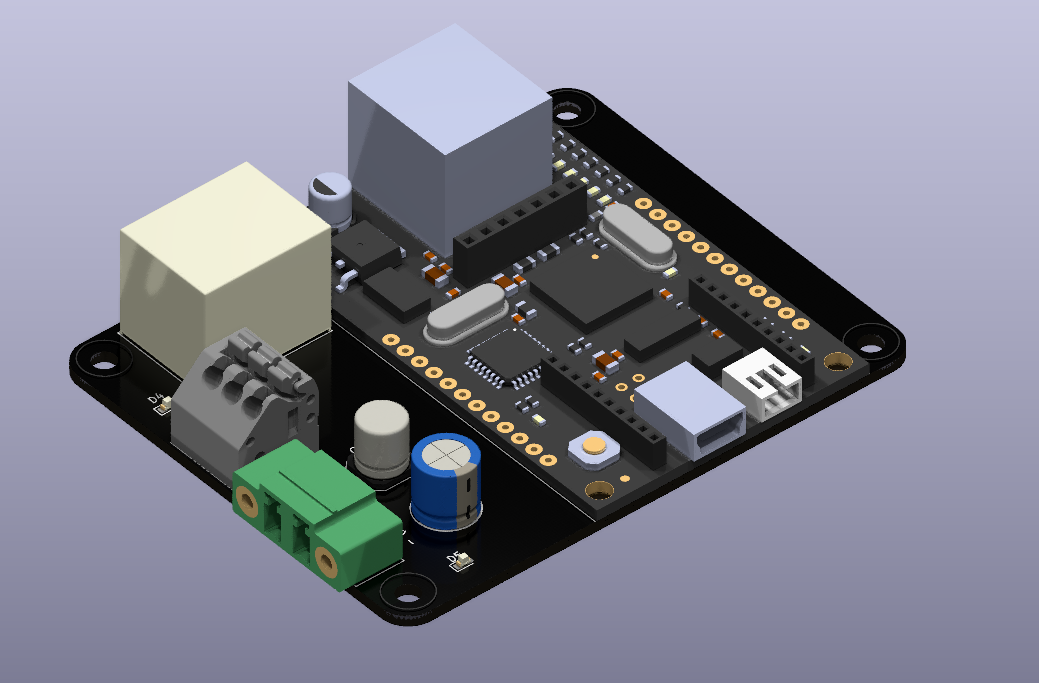
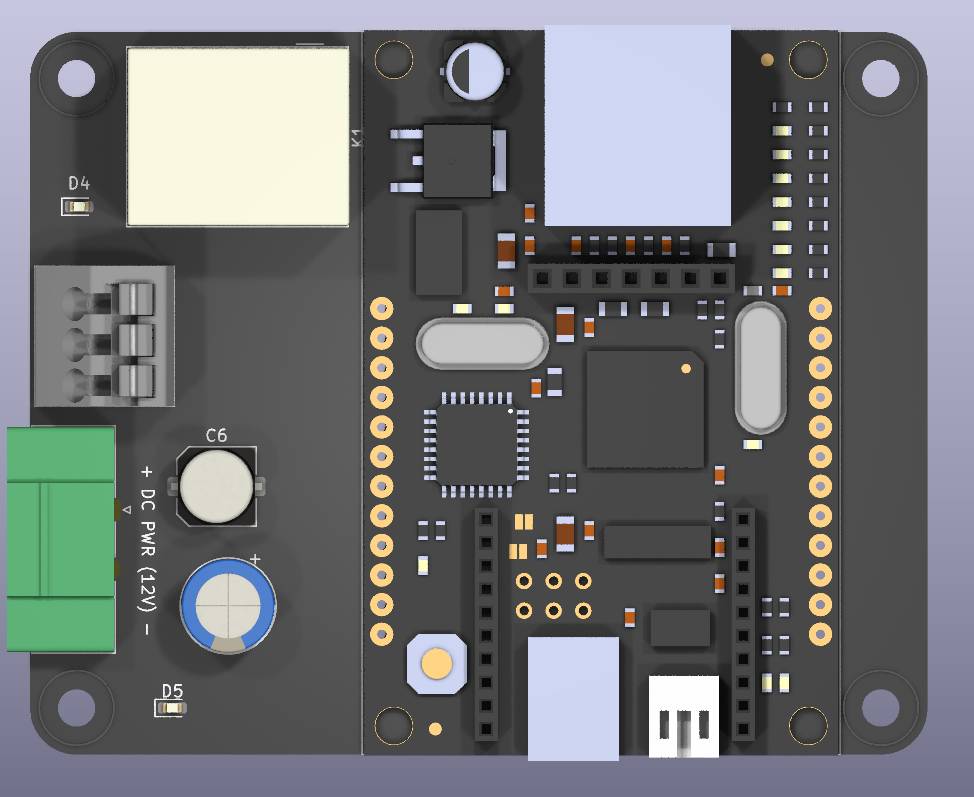
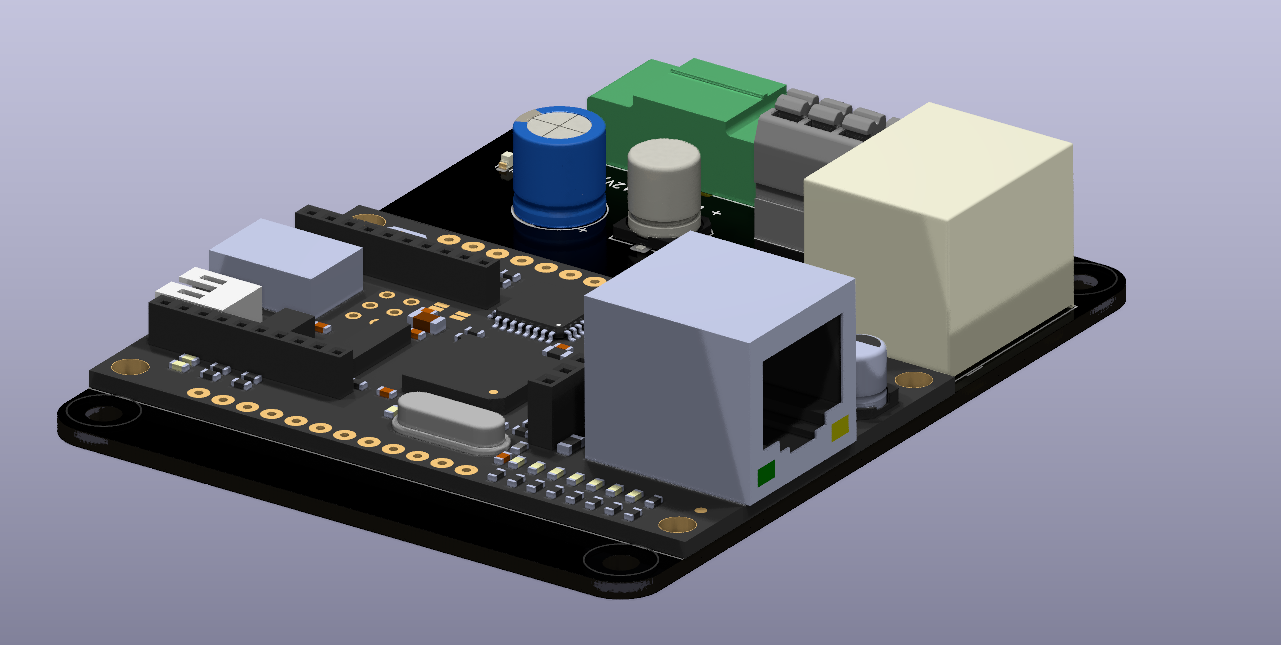
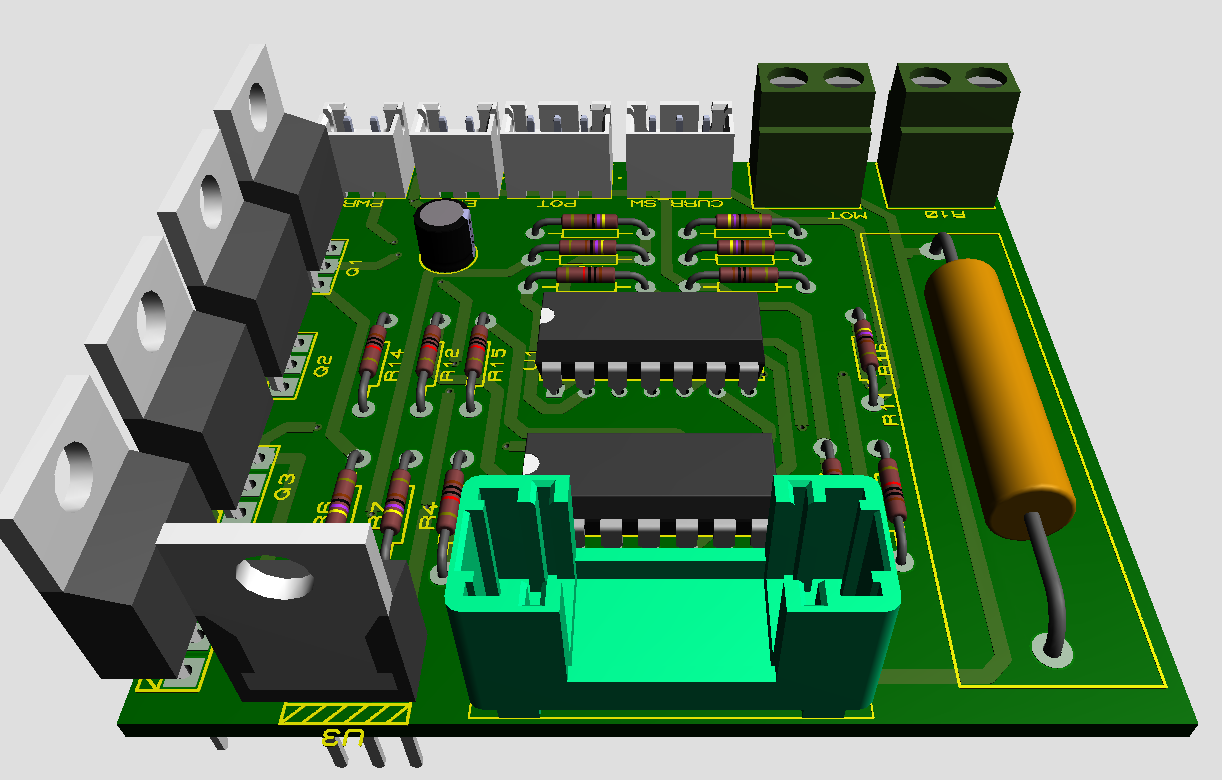
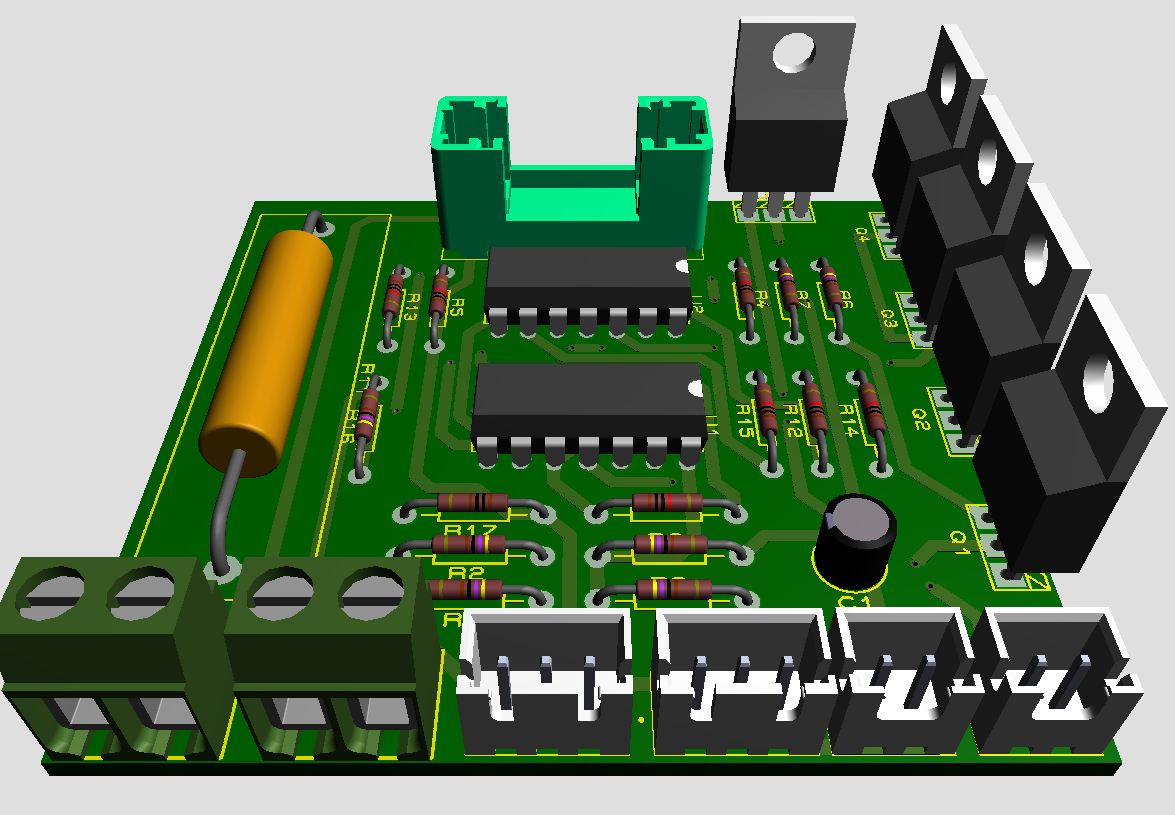
A major part of this work was designing boards that could connect real hardware cleanly and reliably. Instead of using loose wiring for every experiment, I designed PCBs that brought together microcontrollers, power inputs, terminal blocks, connectors, relays, sensing circuits, and control electronics into compact and organized hardware platforms. These boards were designed not only for electrical functionality, but also for mechanical integration, mounting, debugging, and future enclosure design.

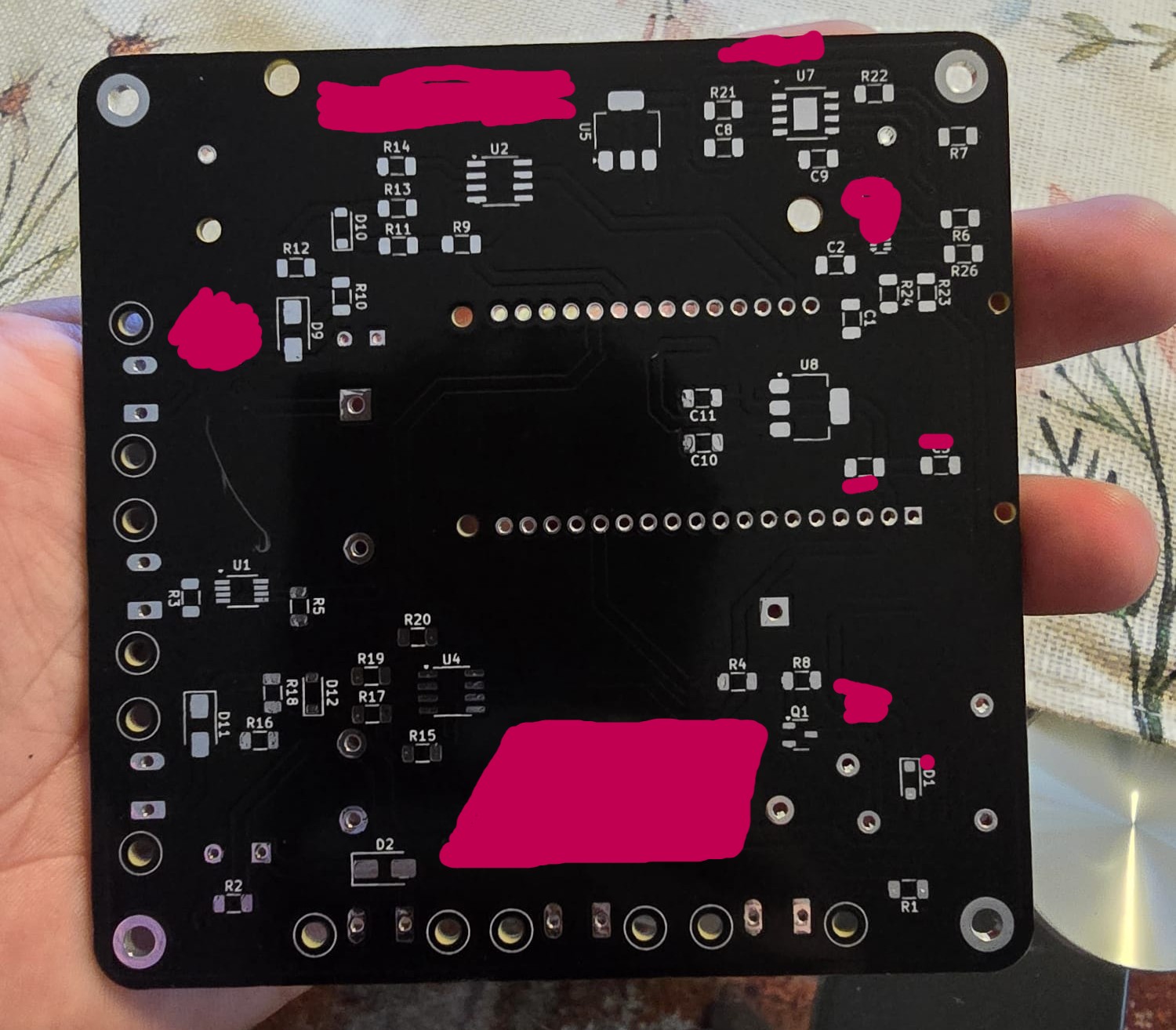
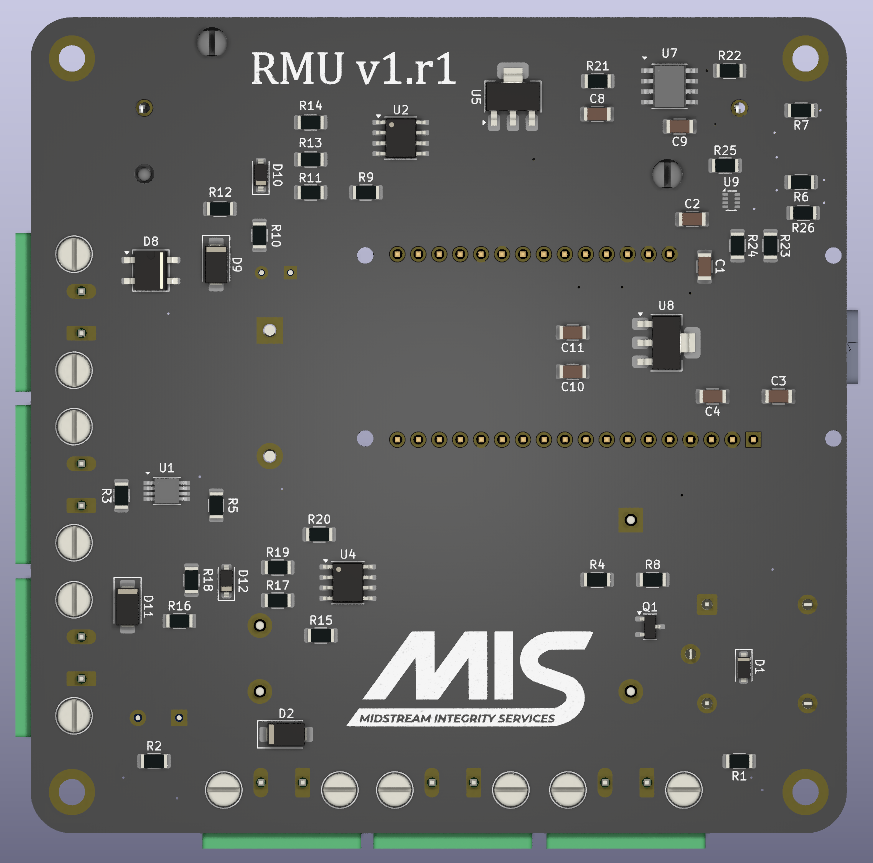
Several boards were developed for research and robotics applications where embedded control, sensing, and actuation had to work together. These designs supported interfaces such as UART, I2C, sensor connectors, actuator connectors, power terminals, and modular microcontroller boards. The goal was to make experimental systems easier to assemble, test, and maintain while reducing wiring errors during repeated lab testing.

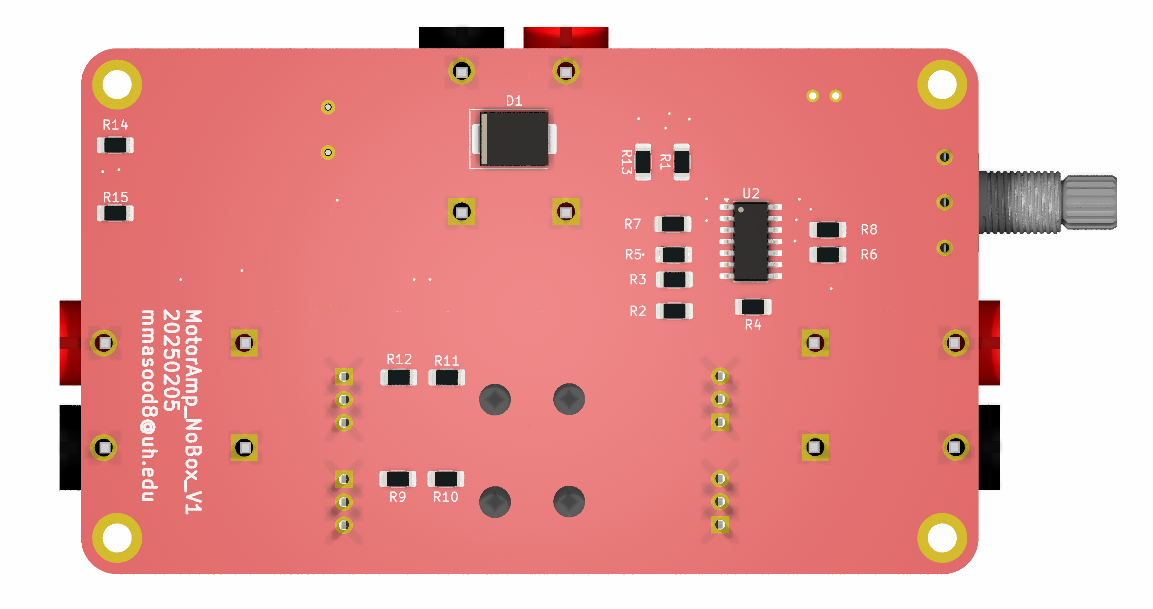
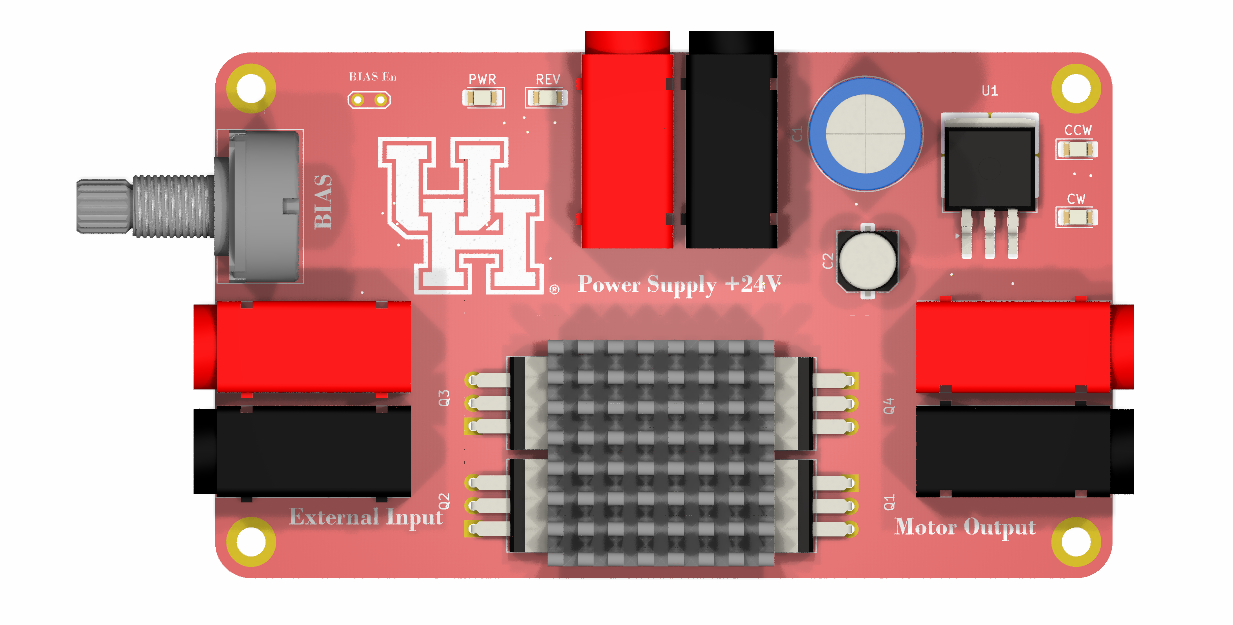
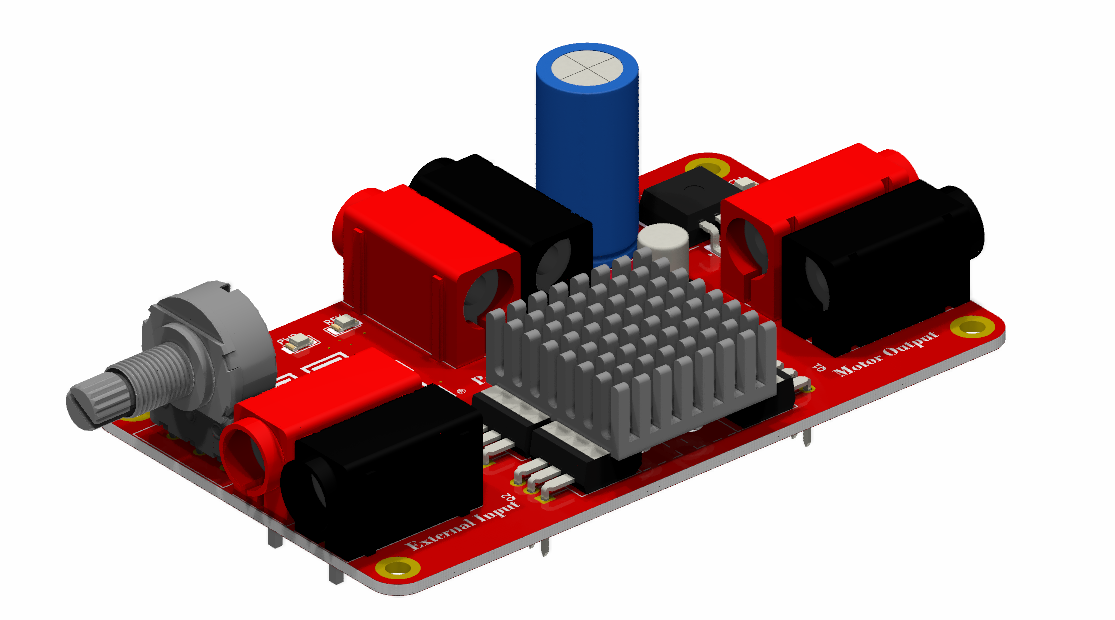
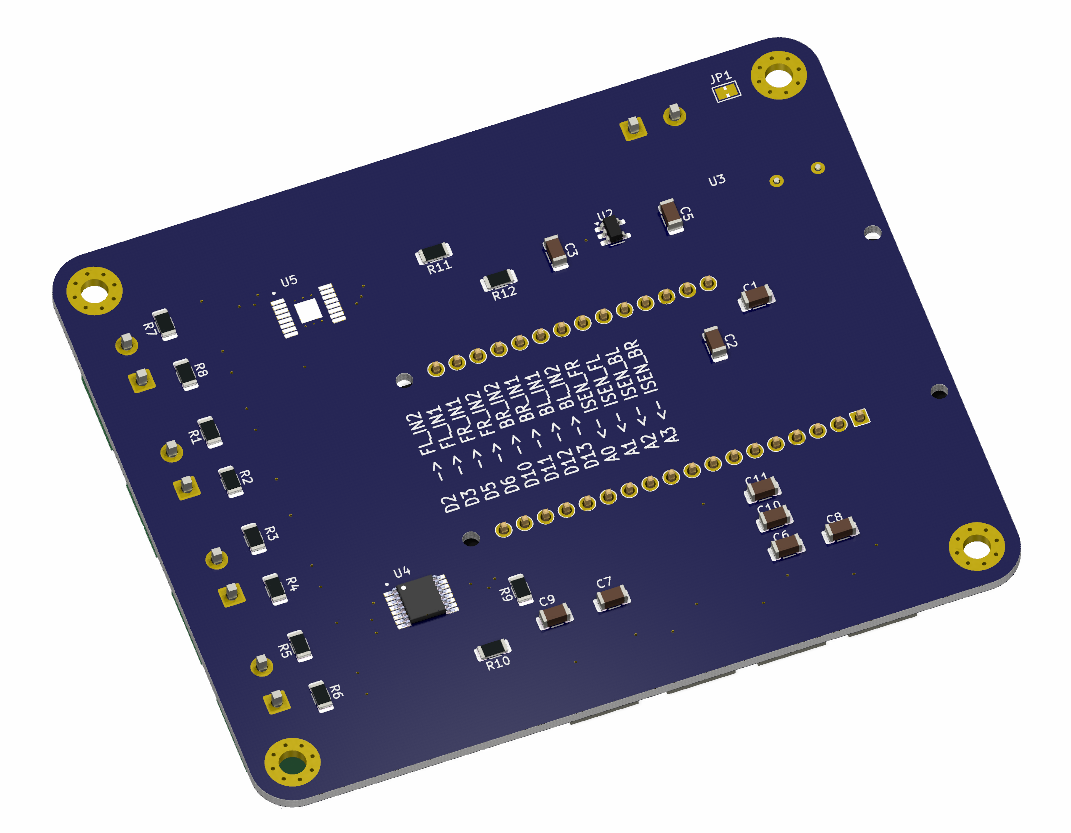
The portfolio also includes motor-driver and actuation-related PCB designs. These boards involved higher-current connections, motor output terminals, external input connectors, power supply sections, heat dissipation considerations, and control circuitry. Such boards are important in robotics because motors, actuators, and power electronics require clean interfaces between low-level control signals and high-power hardware.
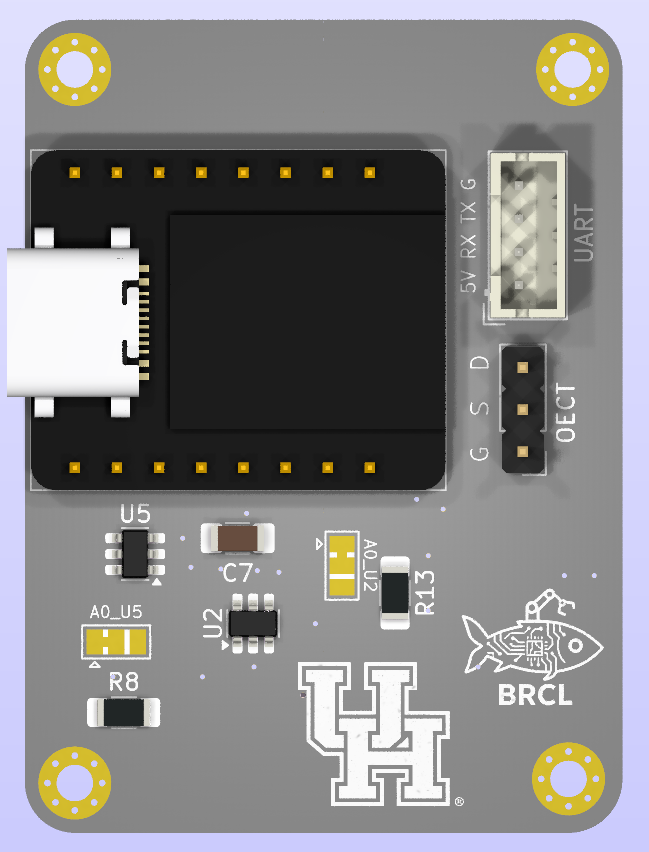
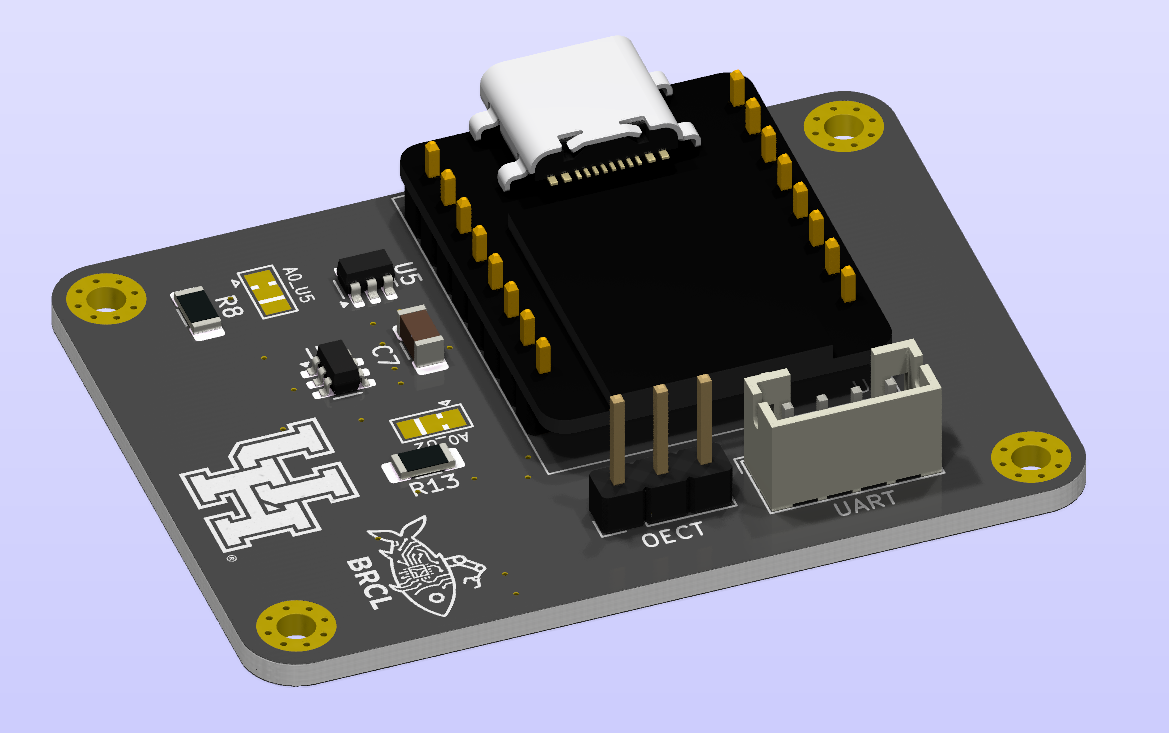
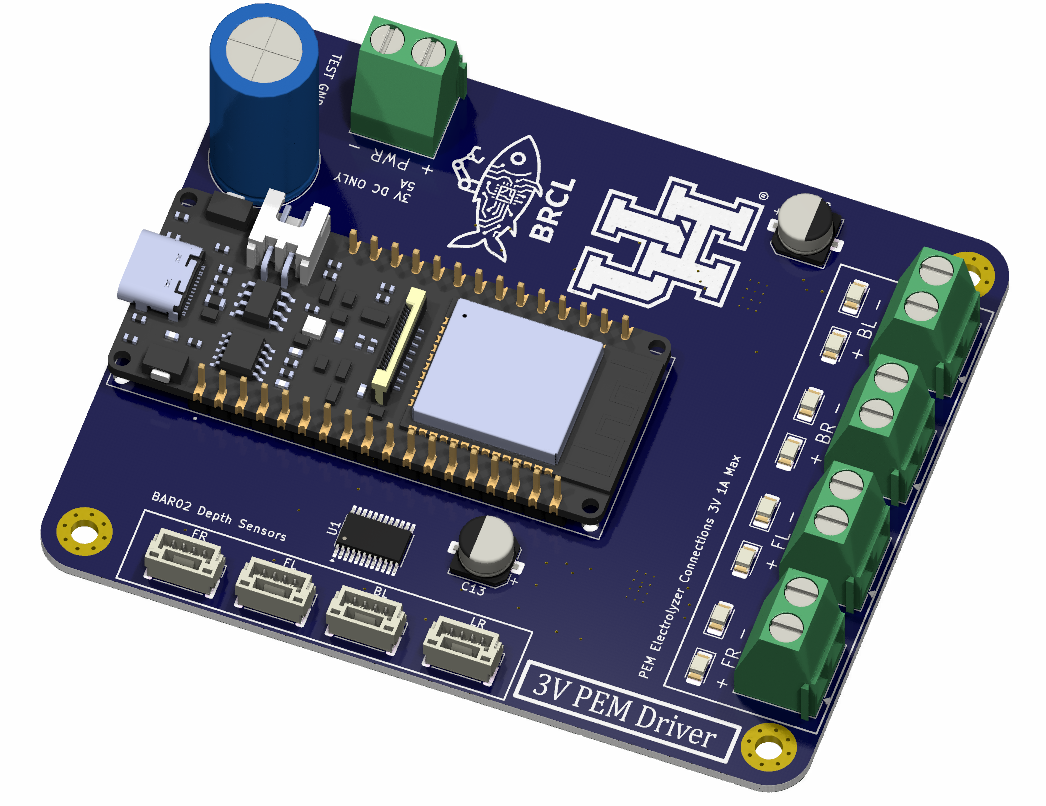
Some of the PCB designs were directly connected to my robotic fish and underwater robotics work. These boards were intended to simplify the integration of sensing, actuation, power, and control signals inside a compact robotic platform. The designs include organized pin mappings, connectors for sensors and actuators, and board layouts that support rapid testing of robotic hardware.

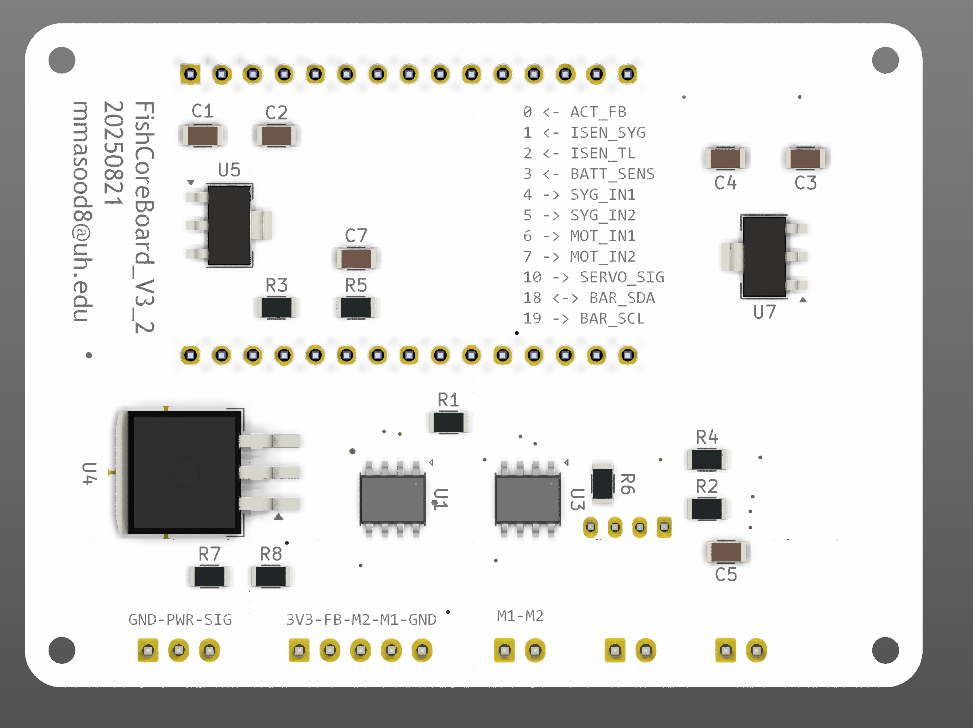
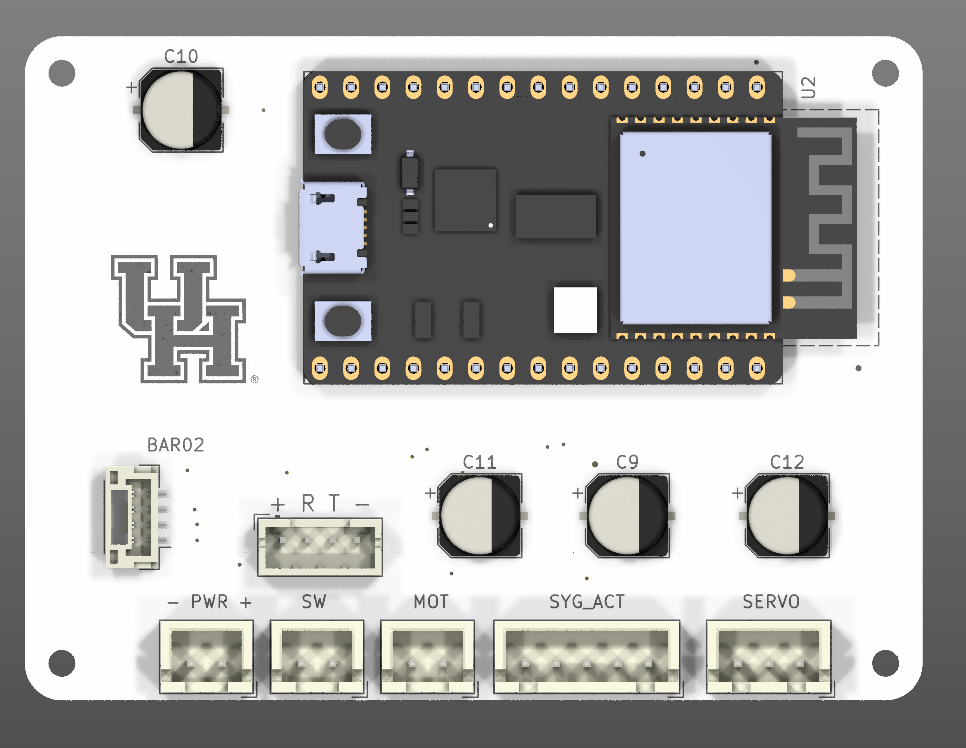
Another important part of this portfolio is the design of custom boards for experimental actuation and buoyancy-control systems. These designs include connectors for multiple channels, sensor inputs, microcontroller integration, and compact routing for a clean experimental setup. This kind of PCB work helped convert early-stage experimental wiring into a more structured and repeatable hardware platform.
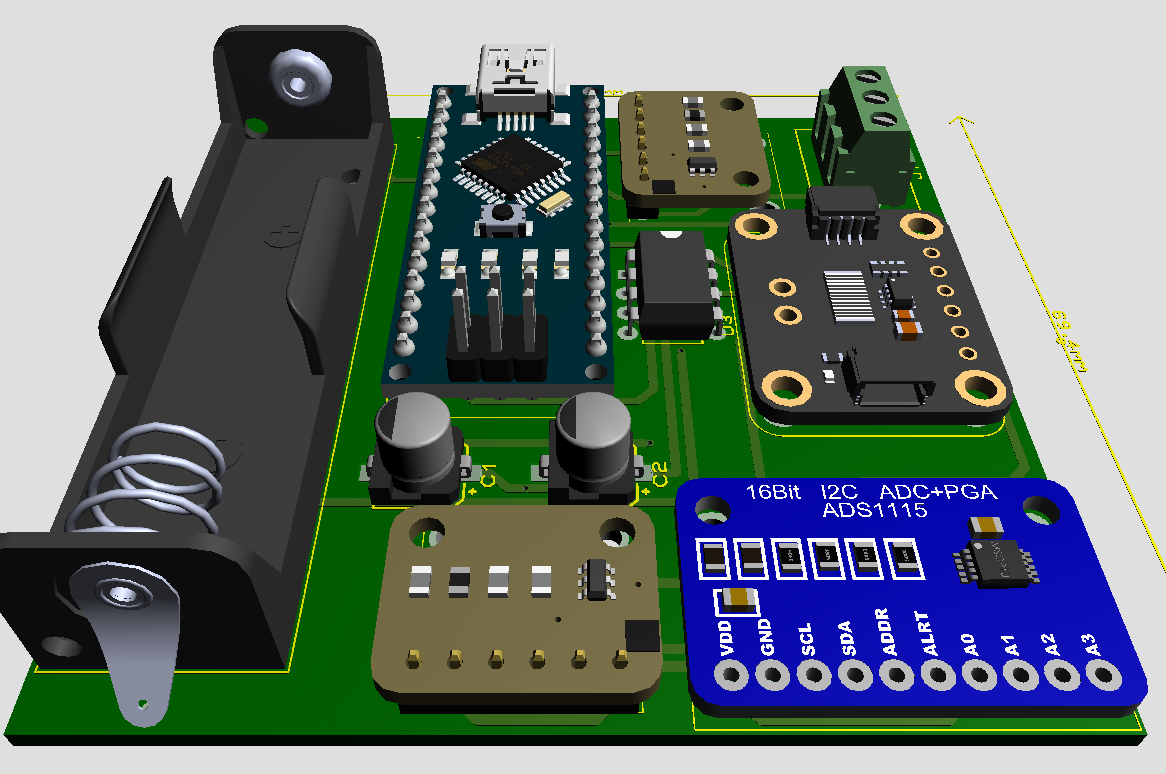
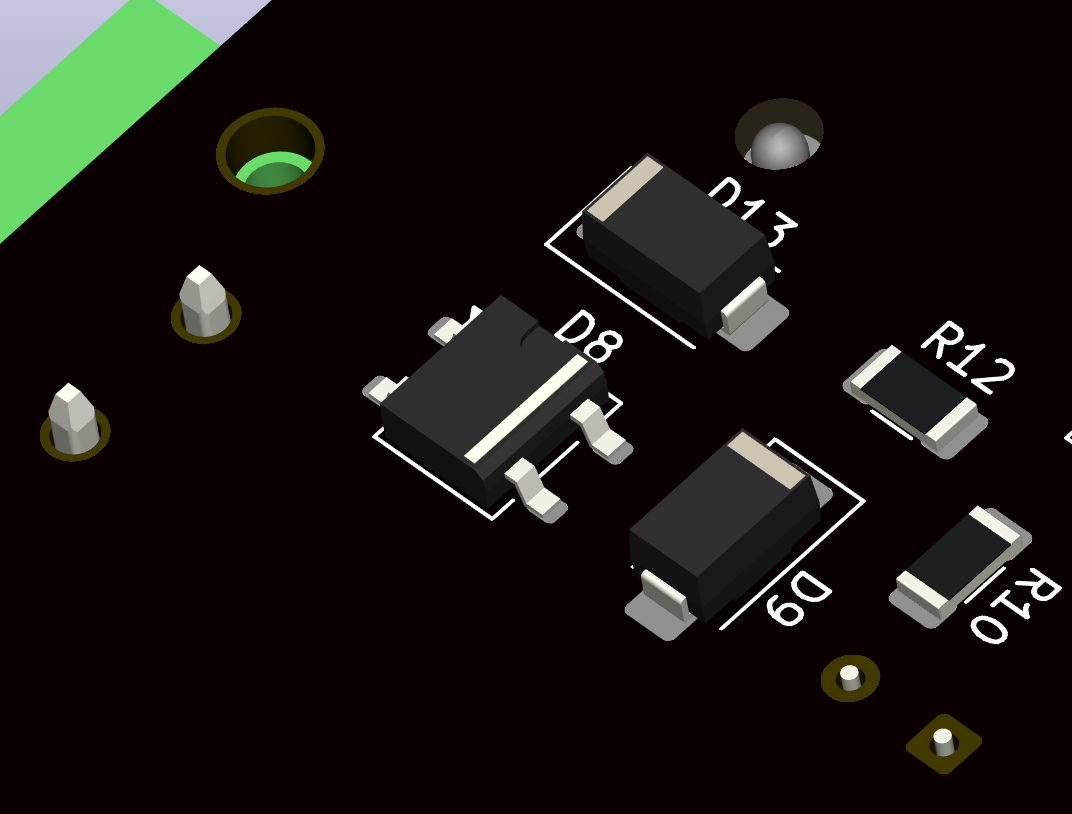
My PCB design experience also includes older-style electronics boards with through-hole components, connectors, power devices, and driver circuitry. These projects reflect the practical side of electronics design: selecting components, arranging connectors for accessibility, thinking about power paths, and preparing a board that can actually be assembled and tested.

Overall, these PCB projects show my ability to design electronics from an engineering-system perspective. I do not see PCB design as only a layout task; I see it as part of a complete robotic or embedded system where mechanical constraints, wiring, debugging, fabrication, power delivery, sensors, actuators, and software all have to work together.
Skills Demonstrated
- PCB schematic design
- Component placement and routing
- Embedded controller integration
- Sensor and actuator interface design
- Motor driver and power electronics layout
- Connector planning and labeling
- 3D PCB visualization
- Prototype fabrication preparation
- Hardware debugging and system integration
- Robotics-focused electronics design
Summary
This PCB design portfolio represents my work in developing practical electronic hardware for robotics, automation, sensing, actuation, and experimental research systems. These boards helped convert ideas and early prototypes into cleaner, more reliable, and more professional hardware platforms.