CAD Design of an IP68 Linear-Actuated Buoyancy Control Device
A mechanical CAD design of a compact variable buoyancy control device using an IP68 linear actuator, developed to support stronger experimental hardware for underwater robotics and control research.
This project focused on the CAD design, fabrication, and successful water testing of a compact variable buoyancy control device, or BCD, for underwater robotics research. The device was developed to support experimental work in underwater depth control, where reliable hardware is just as important as the control algorithm itself.
The main idea was to build a physical buoyancy-control platform that could move beyond simulation and CAD. By using an IP68-rated linear actuator inside a cylindrical module, the system changes its effective displaced volume. This change in volume changes the buoyant force, allowing the device to support upward and downward motion in water without relying only on thrusters.
From CAD Concept to Hardware Design
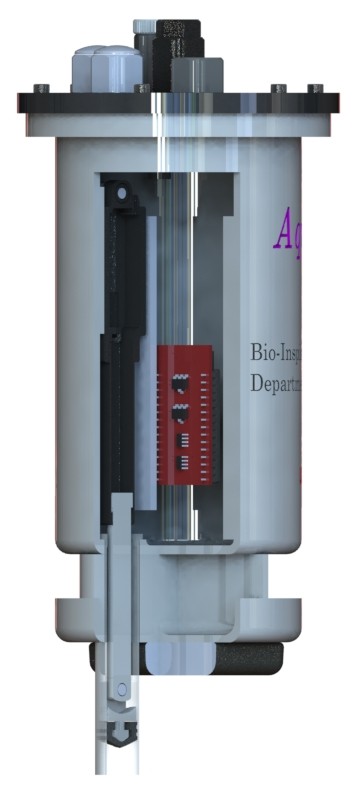
The BCD was first developed as a CAD model to define the overall mechanical structure, actuator placement, mounting layout, and assembly approach. The design used a cylindrical body with a top structural plate, internal actuator support, sealed housing, and lower displacement section.
The goal was not only to create an external shape, but to design a module that could be fabricated, assembled, sealed, and tested in water. This required considering actuator stroke, internal clearance, fastener placement, mechanical alignment, and the available space inside the body.

Section views were especially useful during the design stage because they showed how the internal components fit together. They helped check whether the actuator had enough travel, whether the moving parts had enough clearance, and whether the assembly could be built in a practical way.
IP68 Linear Actuator Integration

The IP68-rated linear actuator was the key component of the device. Since the system was intended for underwater testing, waterproofing was not a secondary feature; it was part of the core design requirement.
The actuator-driven motion changes the device’s displaced volume, which directly affects buoyancy. For controls research, this is important because actuator stroke, speed, limits, friction, and repeatability all influence the behavior of the physical plant. A controller can only be validated properly if the hardware response is consistent and mechanically understandable.
Fabrication and Water Testing
After completing the CAD design, the device was fabricated and assembled into a working prototype. This was an important transition from design to physical hardware. During fabrication and assembly, practical details such as actuator alignment, sealing surfaces, internal fit, mechanical clearance, and structural support had to be checked carefully.
The successful water test was a major milestone. It showed that the device could be built, assembled, placed in water, and tested as a real buoyancy-control platform. This step is important because many control ideas appear valid in simulation, but underwater hardware introduces real effects such as sealing resistance, actuator limitations, friction, buoyancy balance, and assembly tolerances.
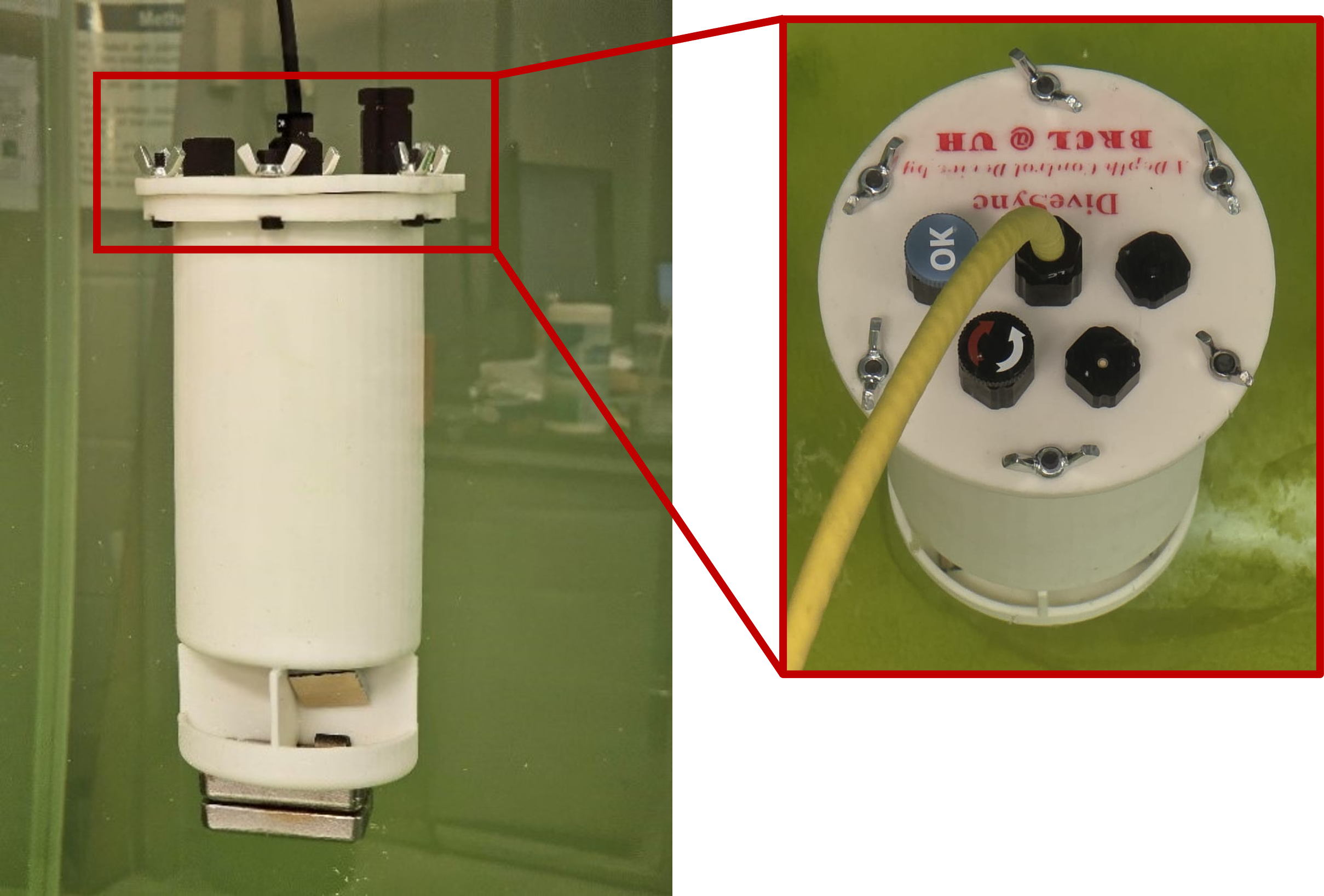
The working prototype shown in water demonstrates that the project moved from CAD modeling to an actual experimental device. It also provides a stronger foundation for future testing because the system can now be studied as a physical plant with real mechanical behavior.
Research Context
This hardware project connects directly with my controls research on variable buoyancy systems. In our paper, Muhammad Umar Masood, Theophilus Kaaya, and Dr. Zheng Chen studied control design for a variable buoyancy system in “Constrained Model Predictive Control of Variable Buoyancy Device”, presented at IEEE/ASME AIM 2023.
That work focused on how actuator constraints, system limits, and dynamic behavior should be considered when designing controllers for underwater buoyancy systems. This CAD and hardware project supports the same research direction from the mechanical side by creating a physical platform that can be used for more realistic controller validation.
The project also relates to broader buoyancy-control research in the Bio-inspired Robotics and Control Lab at the University of Houston. Related work by Wenyu Zuo, Alicia Keow, Denizcan Koc, Fathi H. Ghorbel, and Zheng Chen has explored underwater buoyancy control using electrolysis, reversible PEM fuel cells, and hybrid soft/hard actuation, including “Energy Efficient Depth Control for Underwater Devices Using Soft and Hard Actuators”, “Reversible Fuel Cell Enabled Underwater Buoyancy Control”, and “Optimal Trajectory Planning and Control of Buoyancy Control Device Enabled by Water Electrolyzer”.
Why This Hardware Matters
For underwater controls research, the quality of the hardware strongly affects the quality of the experiment. A variable buoyancy controller depends on actuator travel, response delay, mechanical friction, sealing resistance, chamber volume, and repeatability. If the hardware is not reliable, it becomes difficult to judge whether a control issue comes from the algorithm or from the physical system.
This project was therefore not only about making a CAD model. It was about building a reliable experimental foundation for underwater depth-control research. A working BCD platform can help collect better data, identify more accurate models, and support future validation of advanced controllers such as constrained model predictive control.
My Contribution
My contribution included the CAD design, mechanical integration, fabrication support, assembly support, and water testing of the BCD device. I worked on the cylindrical housing design, IP68 linear actuator integration, internal layout planning, section-view inspection, top and bottom structural components, and preparation of the device as a research platform for future buoyancy-control experiments.
Outcome
The final result was a fabricated and successfully water-tested buoyancy control device. The project moved from CAD design to working underwater hardware, demonstrating that the concept could be physically implemented and used as a foundation for future underwater controls research.