Bio-Inspired Robotic Fish for Underwater Pipeline Tracking
This project focuses on the design, development, and control of a bio-inspired robotic fish for underwater pipeline tracking and monitoring applications.
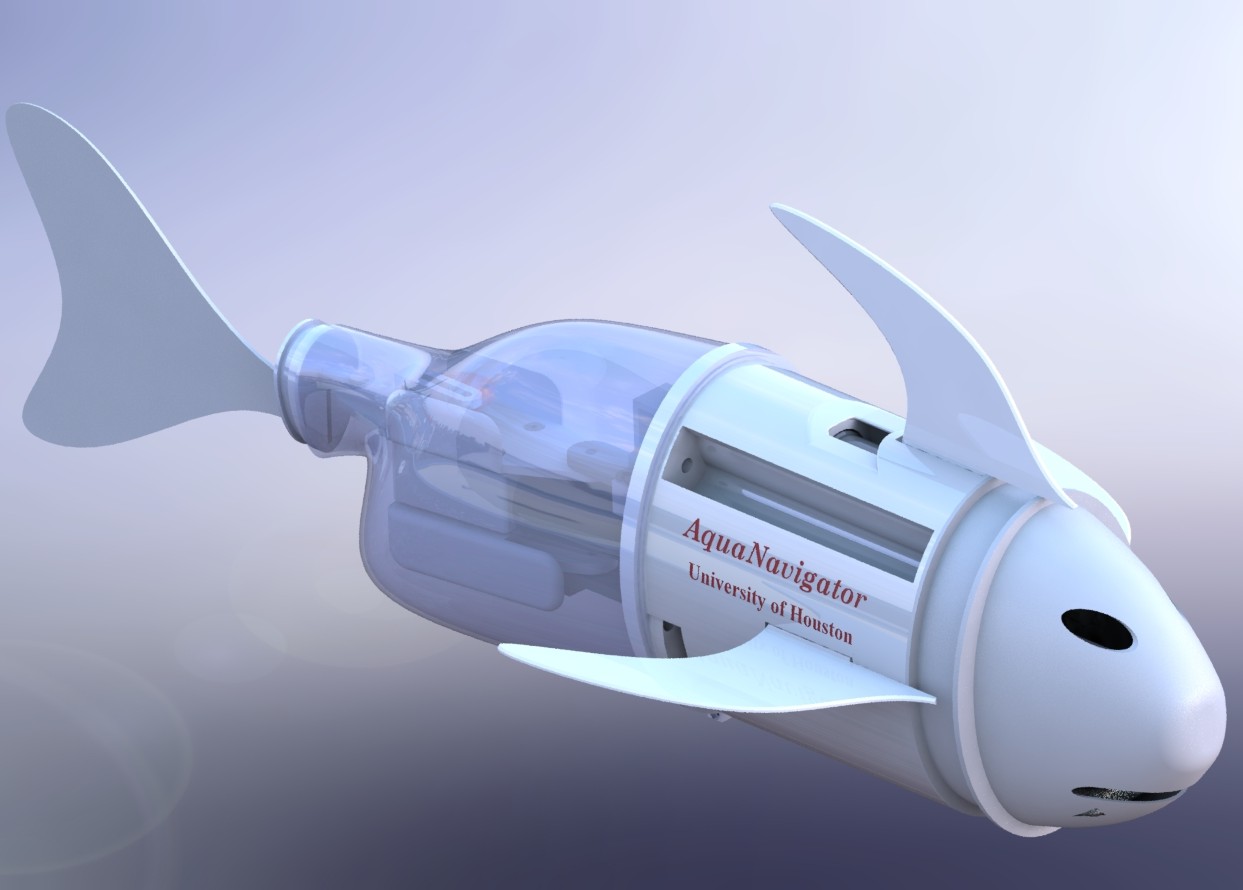
This project focuses on the design, development, and control of a bio-inspired robotic fish for underwater pipeline tracking and monitoring applications. The robot is designed to support autonomous inspection of submerged infrastructure, including pipelines used in offshore energy systems and CO₂ sequestration applications.
The system combines mechanical design, embedded control, underwater sensing, and computer vision. A fish-like propulsion mechanism is used for swimming, while depth sensing and vision-based feedback are used to support underwater navigation and pipeline-following behavior. The project includes work on robotic fish fabrication, tail actuation, buoyancy-based depth control, image-based pipeline detection, and visual servoing control.
This work represents my current research direction in underwater robotics, bio-inspired locomotion, and autonomous monitoring systems for energy infrastructure.