Bio-inspired Robotic Fish Enabled Oil Spillage Monitoring
Development and experimental testing of a bio-inspired robotic fish integrating an OECT-based sensor package for mobile oil-spillage monitoring near submerged pipelines.
I am pleased to share our newly published research article, “Bio-inspired Robotic Fish Enabled Oil Spillage Monitoring,” in Engineering Research Express.
This work presents the development and experimental evaluation of a bio-inspired robotic fish equipped with an integrated oil-sensing system for mobile monitoring around submerged pipelines. The research combines underwater robotics, electronic sensing, mechanical design, and experimental testing to investigate a mobile alternative to conventional stationary oil-leak monitoring systems.
Robotic Fish-Based Oil Monitoring
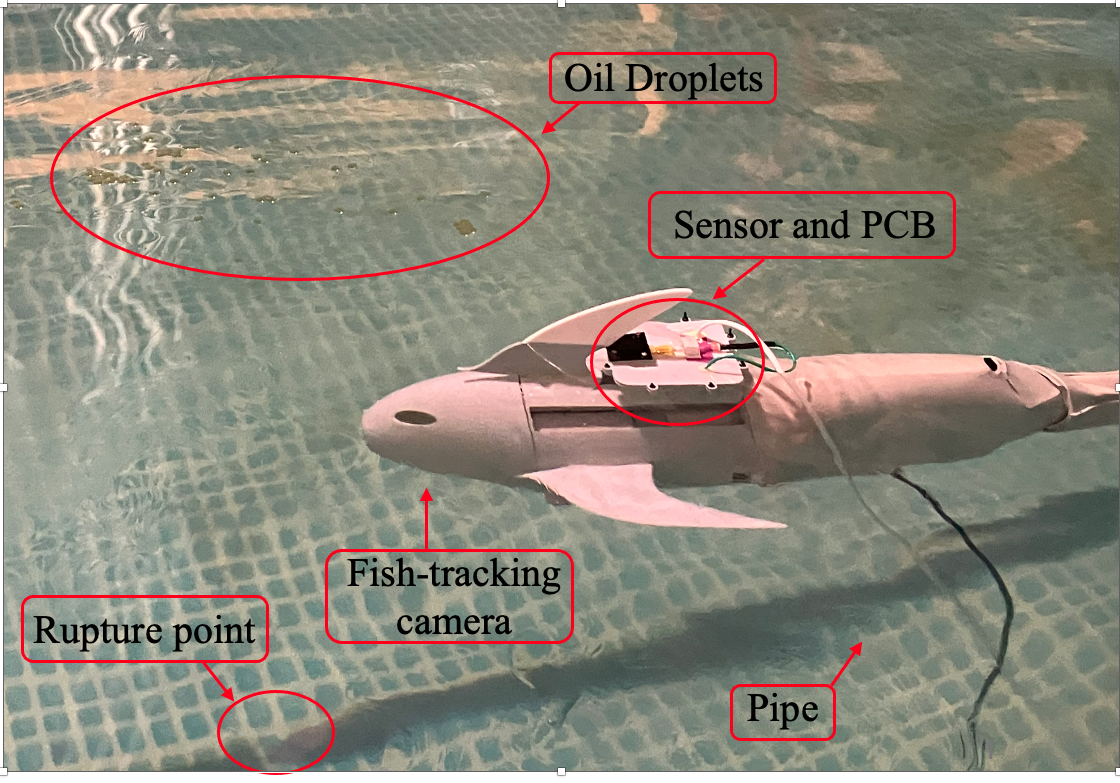
The proposed system uses a bio-inspired robotic fish as a mobile sensing platform. The robotic fish can move through the underwater environment while carrying the oil sensor, signal-conditioning electronics, and supporting hardware.
During experimental testing, the robotic fish was operated near a submerged pipe containing a controlled rupture point. The sensor package was mounted on the robot to measure the surrounding water as the fish moved near the released oil droplets.
OECT-Based Oil Sensor
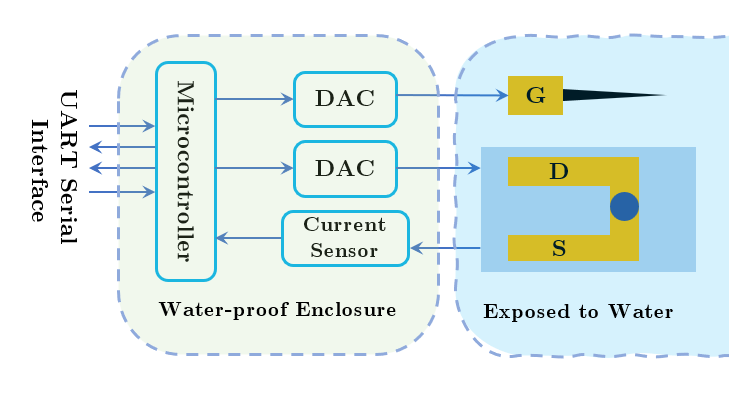
The sensing system is based on an organic electrochemical transistor (OECT). The OECT sensing element is exposed directly to the surrounding water, while the microcontroller, digital-to-analog converters, current-measurement electronics, and supporting circuitry remain protected inside a waterproof enclosure.
The electronics were designed to provide the required sensor excitation, acquire the electrical response of the OECT channel, and communicate the resulting measurements through a serial interface.
Waterproof Sensor Package
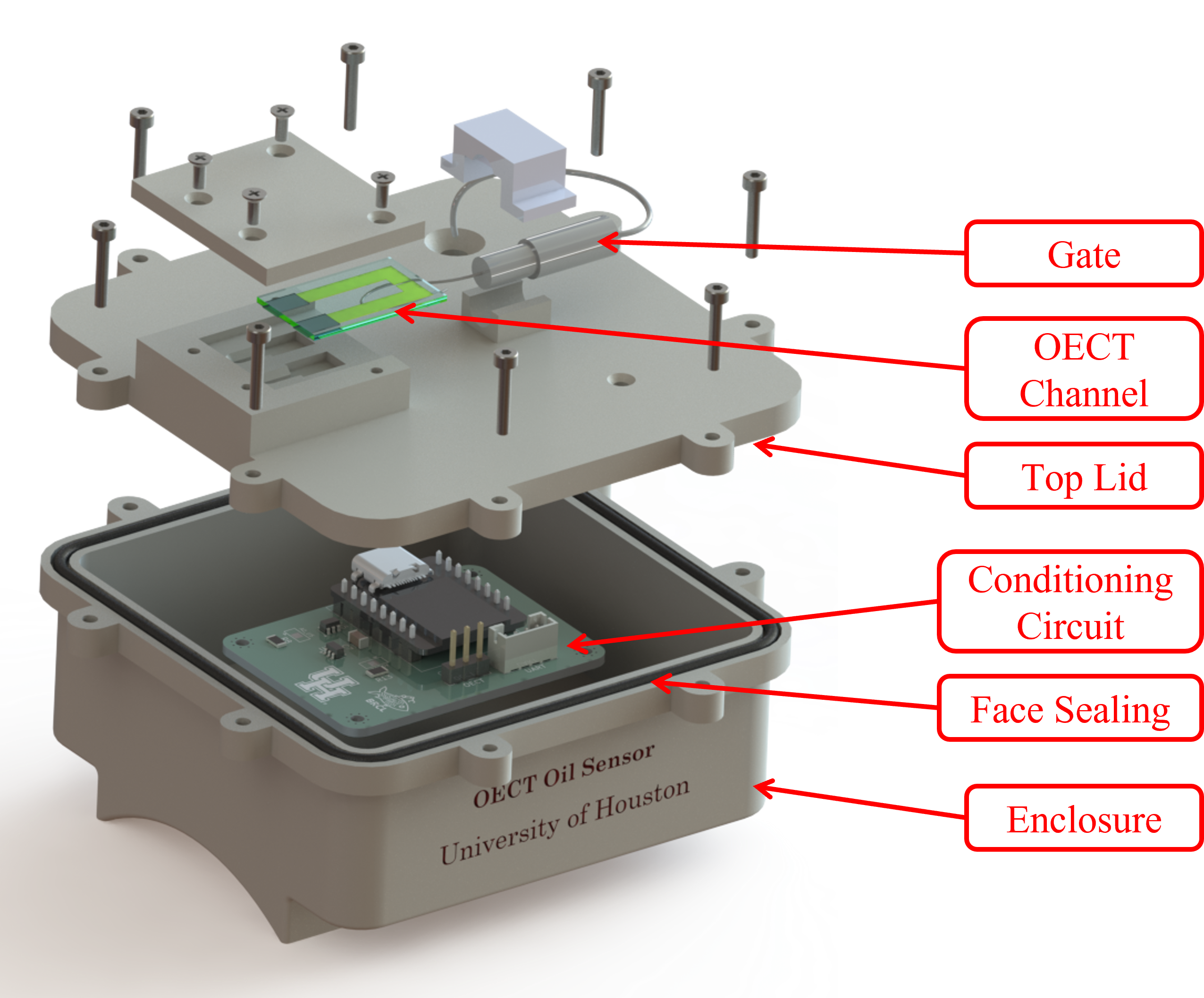
A dedicated enclosure was developed to integrate the sensing and conditioning electronics while allowing the OECT gate and channel to interact with the surrounding water.
The package includes:
- A waterproof electronics enclosure
- A sealed top lid and face-sealing interface
- An internal signal-conditioning circuit
- An exposed OECT channel
- An externally positioned gate electrode
- Mechanical mounting features for integration with the robotic fish
The modular design separates the water-exposed sensing components from the protected electronics while maintaining the electrical connections required for sensor operation.
Interdisciplinary Collaboration
This research was completed through an interdisciplinary collaboration involving researchers from the University of Houston and Rice University.
The work brought together expertise in:
- Bio-inspired underwater robotics
- Mechanical and electronic system integration
- Organic electrochemical transistor sensing
- Materials science
- Chemical and biomolecular engineering
- Underwater experimental validation
I am especially grateful for the collaboration with Professor Haleh Ardebili and her team in the Department of Mechanical and Aerospace Engineering at the University of Houston, as well as Professor Rafael Verduzco and his team in the Department of Chemical and Biomolecular Engineering at Rice University.
I also thank all of my coauthors—Navid Khiabani, Kianoosh Karimi, Wenyu Zuo, Sarah Adaryan, Erin B. Porter, Haleh Ardebili, Rafael Verduzco, and Zheng Chen—for their contributions to this research.
Publication
Muhammad Umar Masood, Navid Khiabani, Kianoosh Karimi, Wenyu Zuo, Sarah Adaryan, Erin B. Porter, Haleh Ardebili, Rafael Verduzco, and Zheng Chen, “Bio-inspired Robotic Fish Enabled Oil Spillage Monitoring,” Engineering Research Express.